TORI : notre premier robot Sumo
Les robots Sumo sont de petits robots destinés à s’affronter sur un plateau circulaire appelé le « Dohyo ». Autonomes, ces derniers ne doivent pas dépasser 10 x 10 cm au démarrage et ne pas peser plus de 500 g. Cette page est consacrée à notre « mini-robot » TORI dont le nom fait référence à celui qui exécute une technique dans les arts martiaux japonais. Contrairement à Uke son partenaire, Tori est celui qui remplit l’exercice et l’achève avec succès.
La conception de TORI s’est effectuée sur sept mois et a fait l’objet de deux versions : une première version pour la Sumobot de Noisy-le-Grand (mars 2016), une seconde pour le Tournoi national de Robotique de Nîmes (mai 2016). En effet, notre participation à la Sumobot nous a permis de connaître la réalité des compétitions et d’adapter la vitesse et la puissance de notre robot Sumo afin qu’il soit de taille à combattre.
Voici, présentés ci-dessous, les différents aspects techniques de TORI.
 |
 |
| TORI VERSION 1 | TORI VERSION 2 |
Les cartes électroniques
1) La carte TORI-LED
TORI est constitué de quatre cartes électroniques. La carte TORI-LED permet de nous différencier des adversaires en jouant sur l’esthétique et l’originalité du robot. Composée de 40 LED RVB dessinant le prénom du robot, celle-ci est placée à l’arrière et s’allume au démarrage. Voici la représentation 3D de la carte TORI-LED réalisée avec le logiciel Altium Designer (un simple clic permet de naviguer dans l’animation).

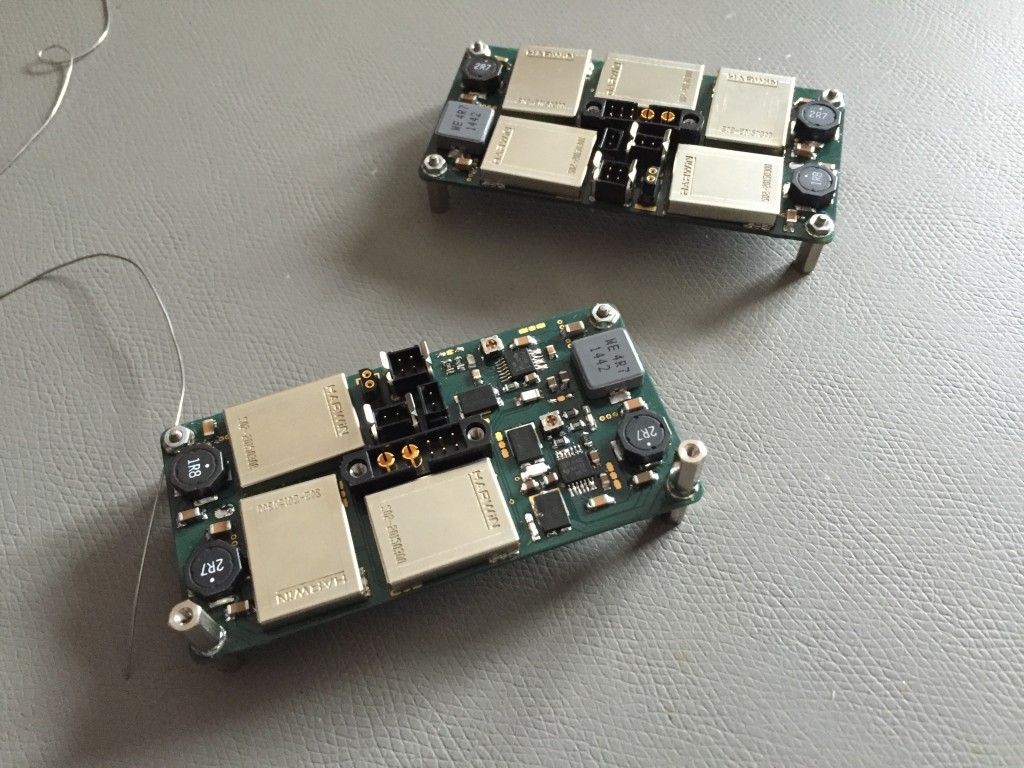
2) Les cartes d’alimentation
Tori est composé de deux cartes d’alimentation montées en parallèle afin d’assurer le fonctionnement du robot en cas de panne de l’une d’elles. Chaque carte permet de délivrer les tensions nécessaires au robot soit 5V pour l’électronique, 6V pour les moteurs et 7.4V pour le servomoteur de la pelle.
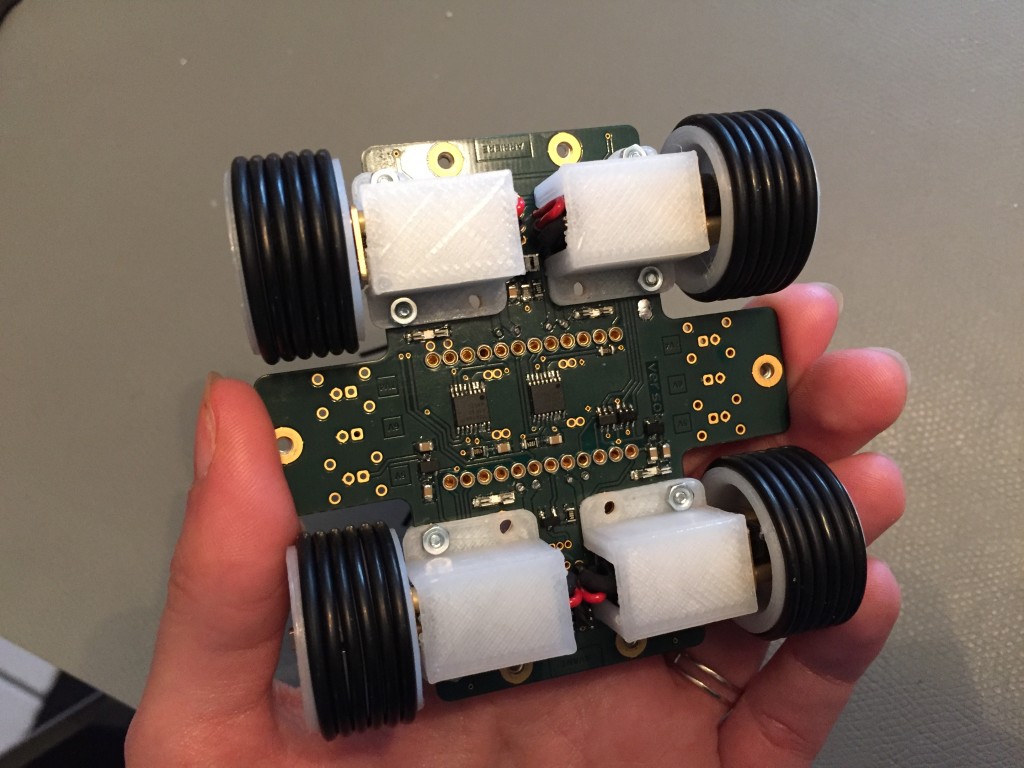
3) La carte SNCC
La carte SNCC (Système Numérique de Contrôle et Commande), placée sous le robot, permet de contrôler les moteurs et les mouvements de la pelle, de gérer la localisation du robot adverse et d’éviter de sortir du plan de jeu grâce à la détection du bord du Dohyo. Elle est donc composée de capteurs optiques, de télémètres à infrarouge, de drivers moteurs et d’une carte Arduino Nano gérant l’intelligence artificielle.
Les PCB ont été fournis par WeDirekt, notre partenaire.
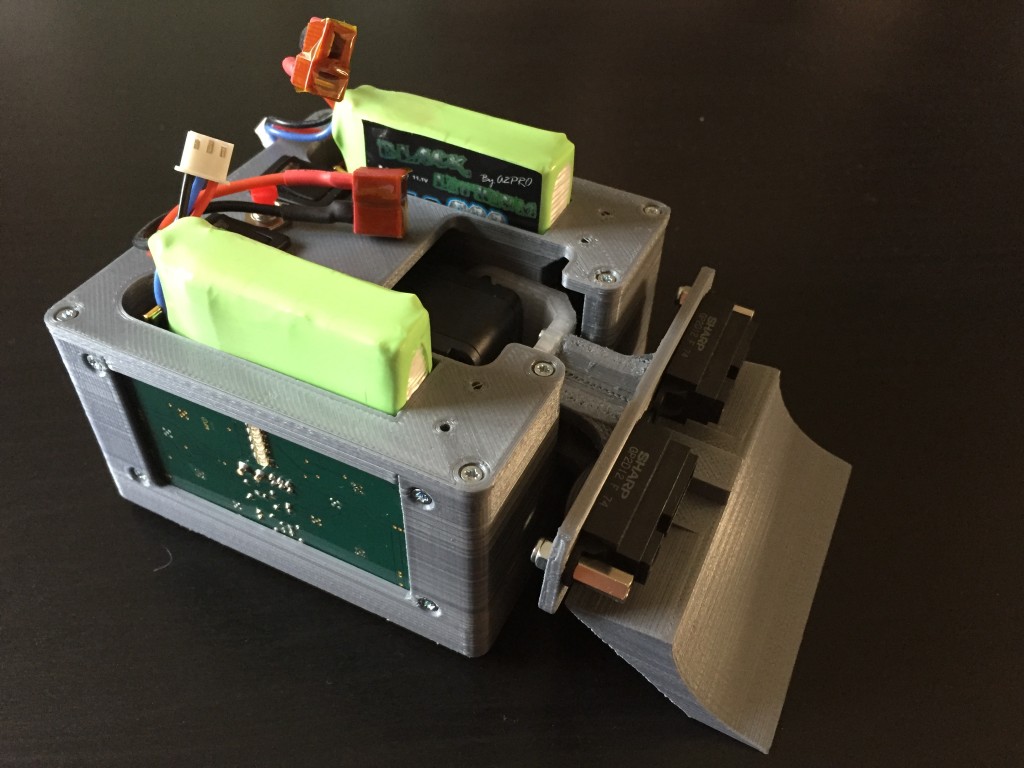
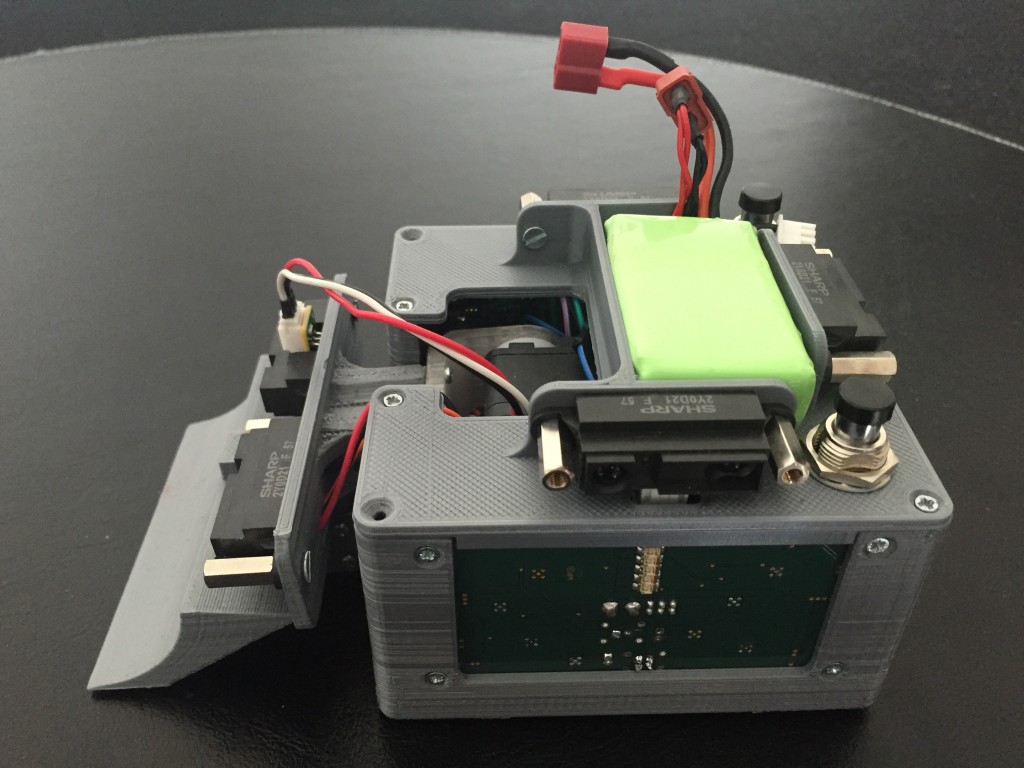
Des batteries performantes
|
Pour alimenter TORI, notre choix s’est porté sur des batteries Lipo 7.4 V de 800mAh. Celles-ci possèdent une grande capacité de décharge (35 C) pour un poids et une taille réduits (50 g pour 55 x 31 x 16 mm). Deux batteries équipaient la version 1 de Tori ; la version définitive n’en possède qu’une. Positionnée sur le dessus du robot afin d’être facilement accessible (remplacement ou risque inhérent à la technologie Lipo), elle nous assure une autonomie suffisante pour enchaîner plusieurs matchs. |
 |
Les actionneurs et capteurs
1) Les moteurs et roues
TORI est constitué de quatre roues motrices actionnées de moteurs miniatures à courant continu et de « jantes » sur lesquelles sont assemblés six joints toriques. Initialement les moteurs choisis avaient une vitesse de rotation de 60 tour/min. Pour augmenter la vitesse de déplacement de TORI, nous les avons remplacé par des moteurs de 300 tour/min.
2) Les capteurs
TORI détectait son adversaire grâce à deux télémètres infrarouges (GP2D12) placés uniquement sur le devant. Lors de la première compétition, nous nous sommes aperçus que TORI manquait de visibilité. Trois capteurs supplémentaires (infrarouge) ont été ajoutés sur les côtés pour pallier ce problème.
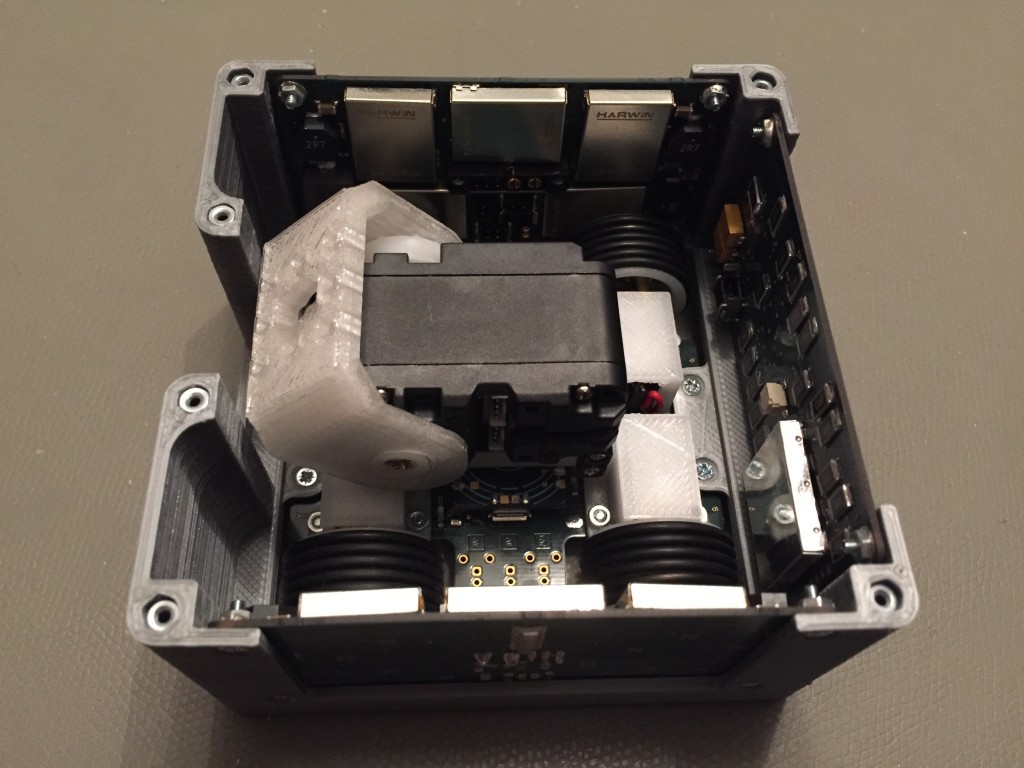
3) Le servomoteur
TORI est équipé d’une pelle pour pousser l’adversaire hors du plan de jeu. Celle-ci est actionnée par un servomoteur « intelligent » Herkulex DRS-0101. A la différence des servomoteurs « classiques », celui-ci peut être commandé, entre autres, en vitesse, en position etc, et vérifie lui-même ces informations.
 |
 |
 |
La mécanique
1) Les pièces 3D
TORI est conçu grâce à l’assemblage de dix pièces, dessinées sur SolidWorks (logiciel de CAO) et réalisées par notre partenaire Stratomaker ! La qualité d’impression et la finition des pièces font de TORI un robot remarqué lors des différentes compétitions.
2) Les caractéristiques
Dans sa position initiale (avant combat), TORI a une base carrée de 98 mm de côté et une hauteur de 125 mm. Une fois lancé (pelle abaissée), TORI mesure 156 mm de long, 98 mm de large et 70 mm de haut. Son poids total est de 476 grammes.