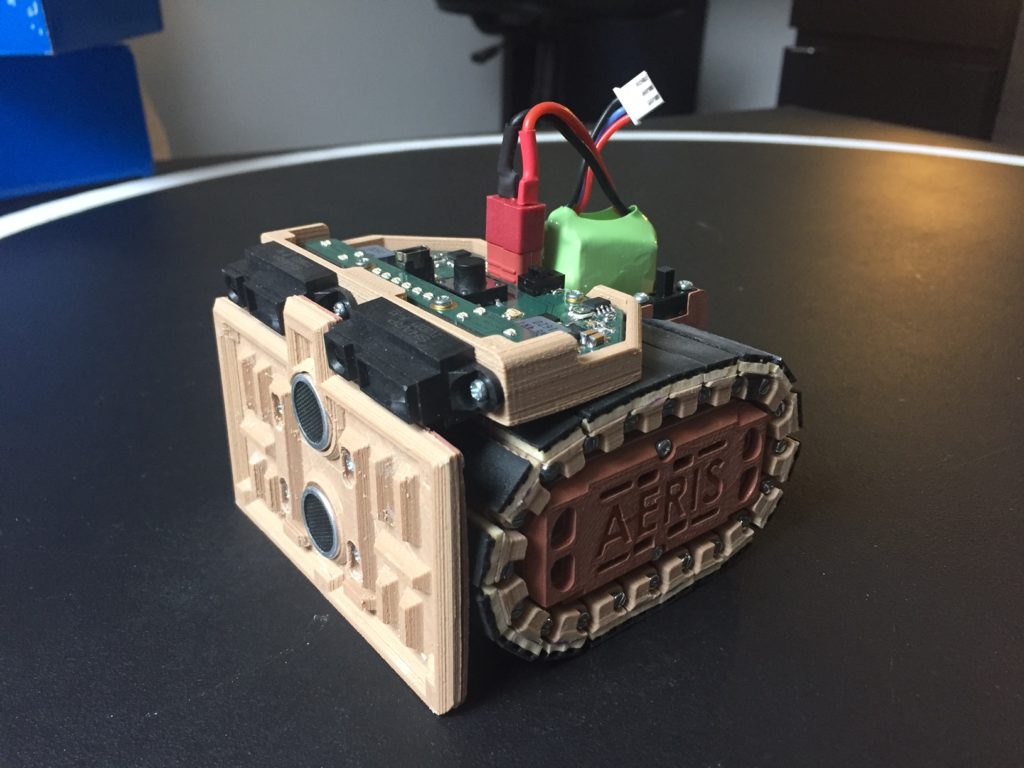
AERIS : notre mini char Sumo !
Cette page est consacrée à notre deuxième robot Sumo AERIS dont le nom s’inspire du latin pour symboliser le cuivre, matériau qui le constitue en partie. La force d’AERIS tient en la présence de chenilles évoquant la force et l’adhérence d’un char d’assaut.
La conception d’AERIS s’est déroulée sur 6 mois et a fait l’objet de plusieurs modifications au fur et à mesure.
Ci-dessous une présentation des caractéristiques d’AERIS.
 |
|
| AERIS VERSION 1 |
Les cartes électroniques
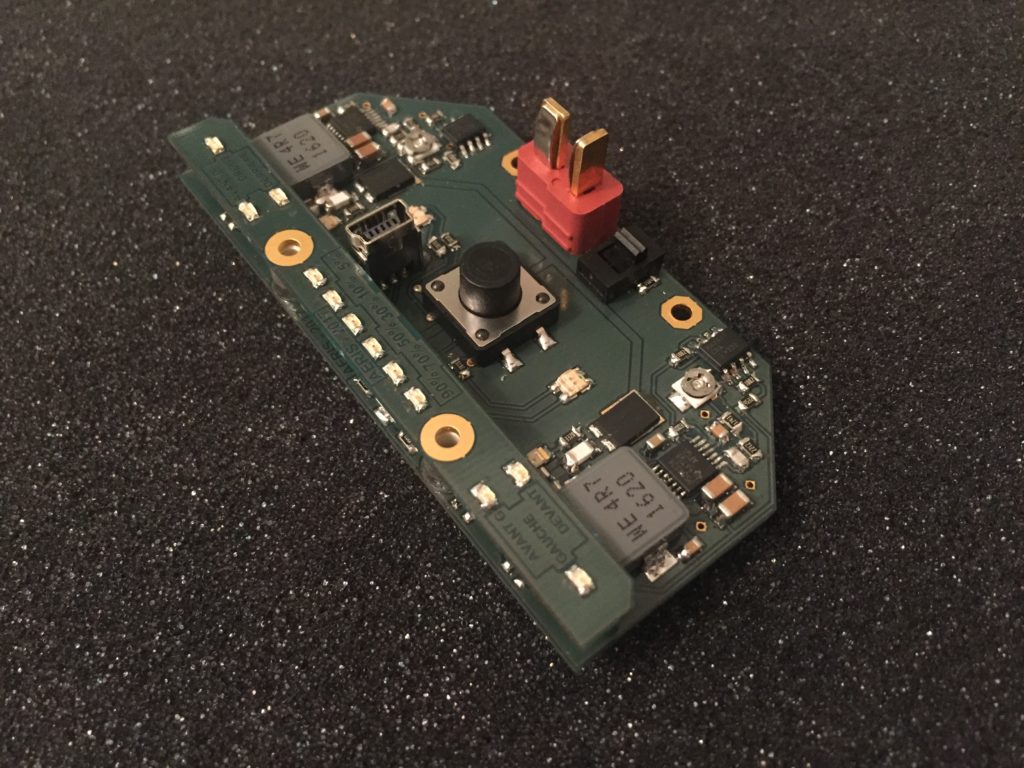
1) La carte IHM
|
La carte IHM, la plus grande, est placée sur le dessus du robot. Elle fait l’interface entre l’homme et la machine et permet notamment de visualiser l’état des capteurs et le niveau de la batterie. Elle transforme également l’alimentation de la batterie en alimentation stable pour le robot (5 volts). |
 |
2) La carte IA (Intelligence Artificielle)
 |
La carte Intelligence Artificielle est positionnée à la verticale dans le corps du robot. Elle permet de contrôler l’état des capteurs et d’agir en conséquence. |
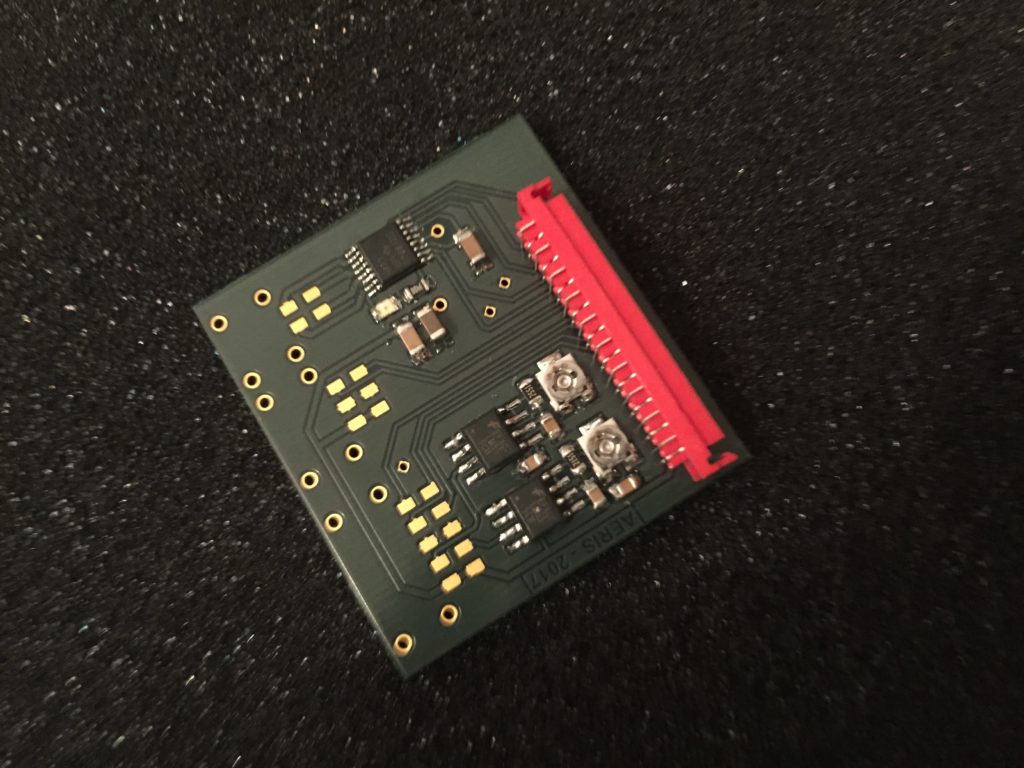
3) La carte Pilotage moteur
|
La carte de pilotage du moteur permet de faire l’intermédiaire entre la puissance de la batterie et les commandes de l’Intelligence Artificielle. Elle assure, grâce à un driver moteur, la transmission d’une puissance suffisante aux moteurs. De plus, elle alimente et centralise l’ensemble des capteurs d’AERIS. |
 |
4) Les détecteurs de ligne blanche
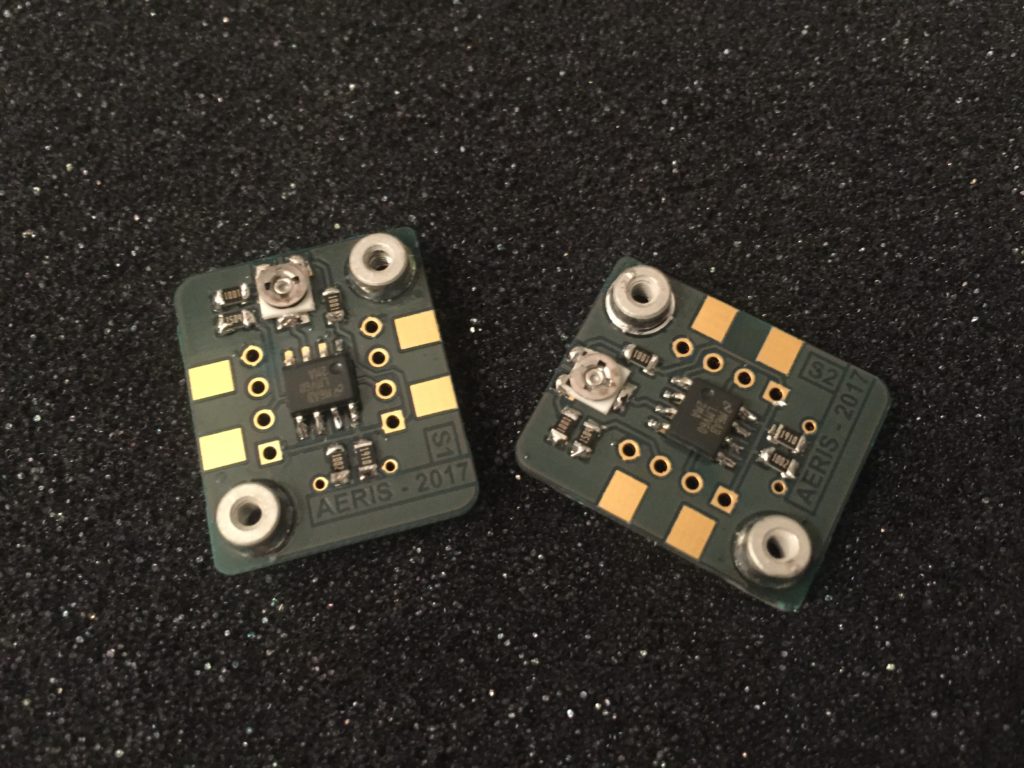 |
Deux cartes capteurs sont situées sous le robot et sont équipées de photo-transistors permettant de repérer la ligne blanche qui délimite le plan de jeu. |
L’ensemble des cartes ont été dessinées sur le logiciel Altium Designer; les PCB ont été fournis par WeDirekt. Merci à nos partenaires.
Une batterie performante
|
Convaincus par l’utilisation des batteries Lipo 7.4 V de 800mAh sur TORI, nous avons décidé d’équiper AERIS d’une telle batterie. Celle-ci possède une grande capacité de décharge (35 C) pour un poids et une taille réduits (50 g pour 55 x 31 x 16 mm). Positionnée sur le dessus du robot afin d’être facilement accessible (remplacement ou risque inhérent à la technologie Lipo), elle nous assure une autonomie suffisante pour enchaîner plusieurs matchs. |
 |
Les actionneurs et capteurs
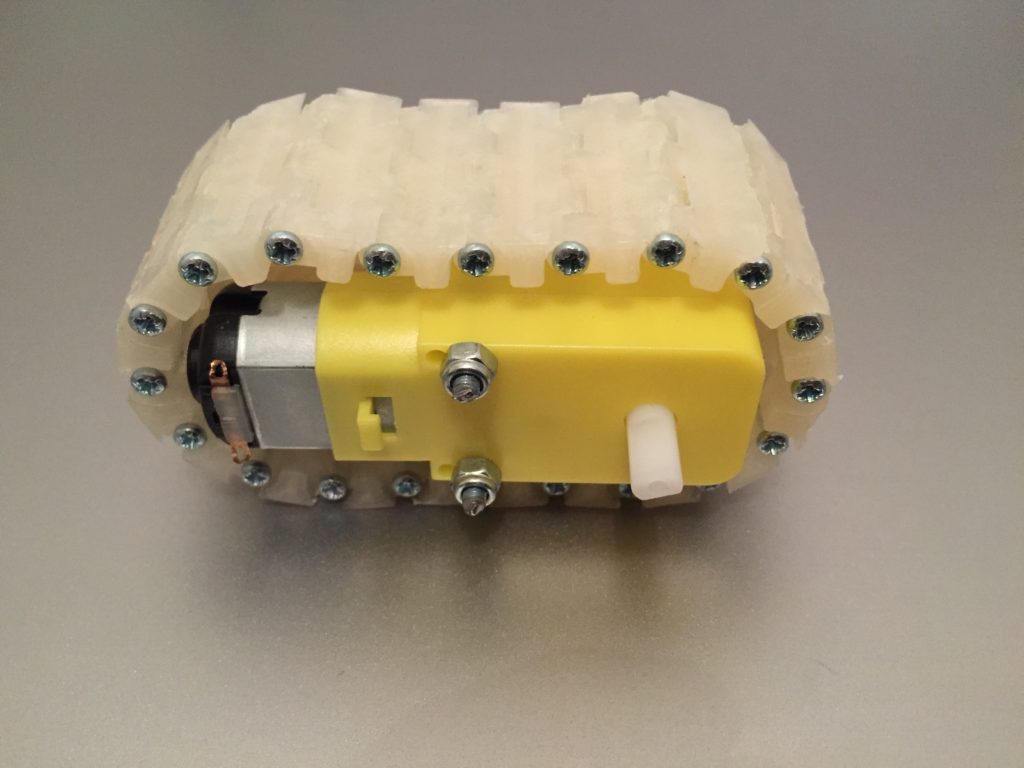
1) Les moteurs et chenilles
AERIS est constitué de deux chenilles actionnées par des moteurs à renvoi d’angle, permettant un gain de place dans le robot. Les chenilles, constituées de 20 maillons chacune, sont recouvertes d’une matière très adhérente permettant à AERIS de rester « collé » sur le plan de jeu.
2) Les capteurs
Au départ, nous avions prévu des cartes capteurs infrarouges faites maison. Toutefois, il s’est révélé difficile de les mettre en place d’autant plus que la date de la compétition approchait. Nous avons donc décidé de changer le système de capteurs du robot. Ainsi AERIS est équipé d’un capteur ultrasonore et de deux capteurs infrarouges afin de détecter et de suivre notre adversaire. A l’inverse de son grand-frère TORI, AERIS ne possède pas de capteur à l’arrière ni sur les côtés. Toutefois, sa vitesse lui permet de rapidement tourner sur lui-même.
 |
 |
 |
La mécanique
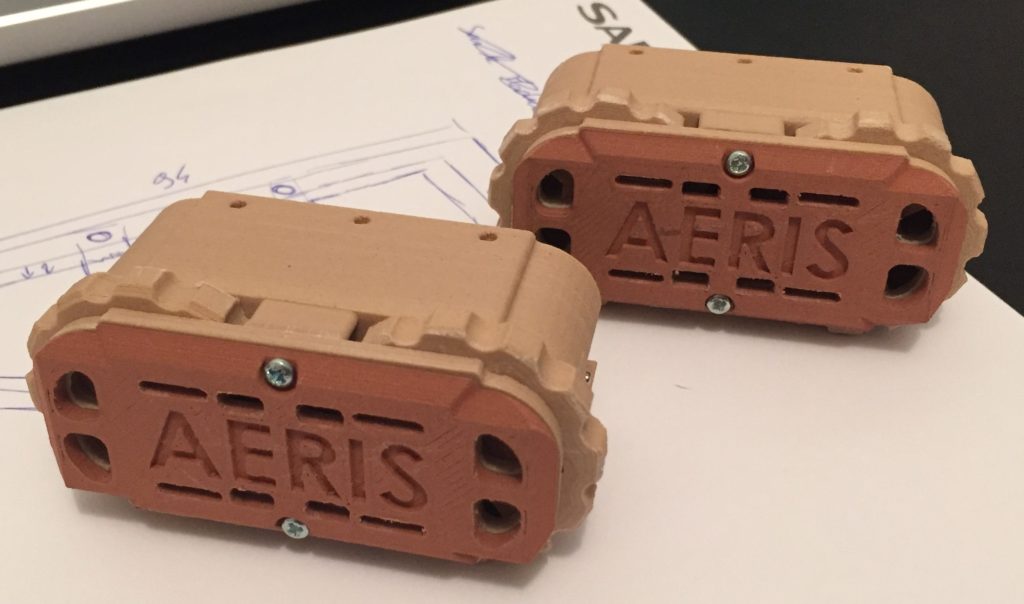
1) Les pièces 3D
 |
AERIS est conçu grâce à l’assemblage de cinquante-huit pièces réalisées à l’aide de filaments à base de bois et de cuivre. Dessinées sur SolidWorks (logiciel de CAO), elles ont été réalisées grâce à l’imprimante de notre partenaire Obro, la Stratomaker. La qualité d’impression et la finition des pièces font d’AERIS un robot remarqué et primé lors de la Sumobot. En effet, AERIS a conquis le jury qui lui a décerné le prix du meilleur design. |
2) Les caractéristiques
AERIS a une base carrée de 98 mm de côté et une hauteur de 78 mm. Son poids total est de 497 grammes.